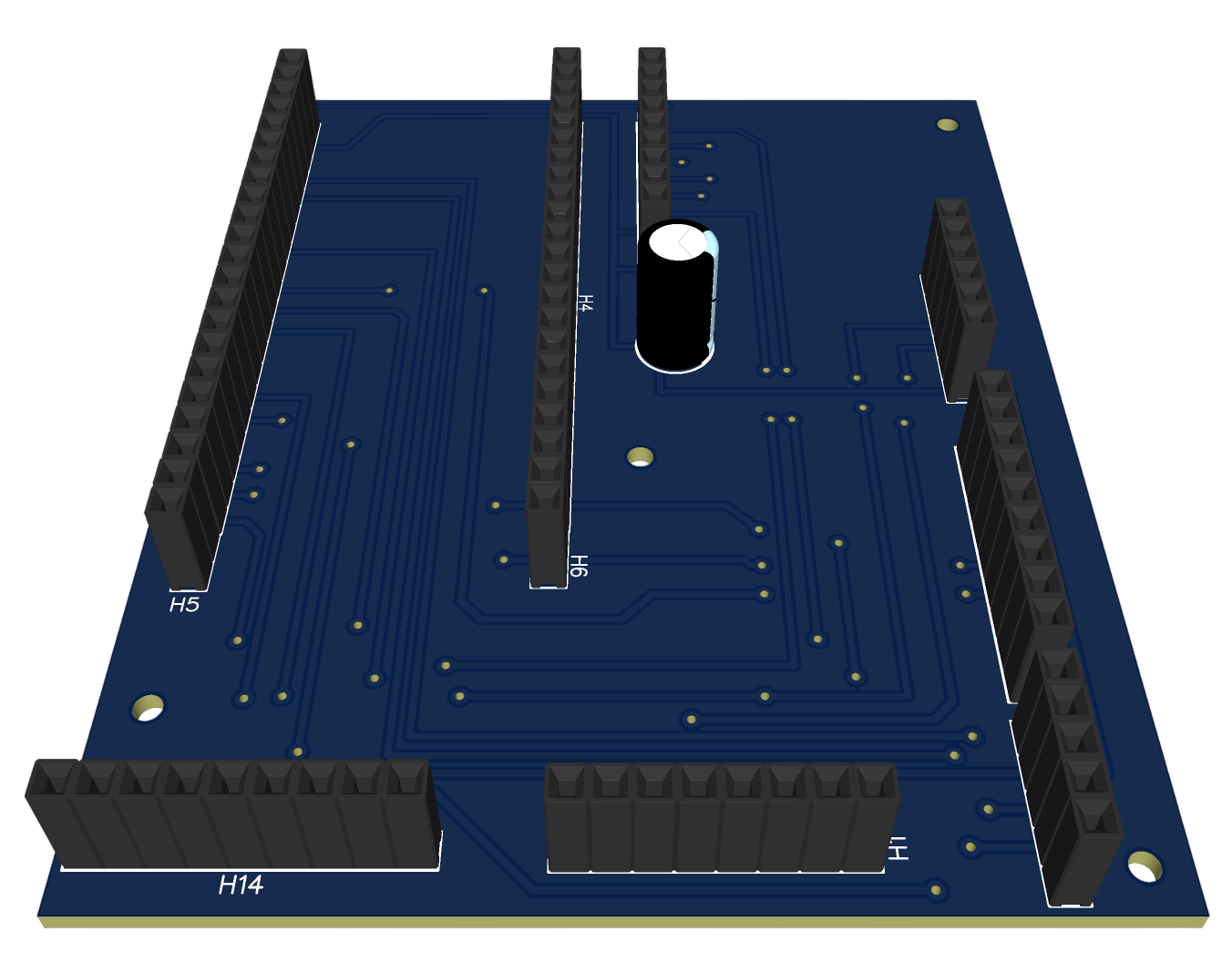
This PCB was developed as the main flight computer for our Cansat project, a soda-can-sized satellite designed for environmental sensing and telemetry. The project was built for the CanSat International Competition organized by UNAM in Mexico.
The board was built around a practical engineering philosophy: simplify integration, reduce wiring complexity, and make debugging as straightforward as possible. Plug-and-play connectors, clearly organized interfaces, and accessible test points allowed the team to validate subsystems quickly and isolate issues during development.
By consolidating sensors, communications, and power distribution into a single board, the PCB provided a reliable platform for testing and system integration throughout the project.